Quadcopters have become fairly commonplace in recent years. On YouTube, there is a video by a German man who has designed his own Hexacopter. The Hexacopter is microprocessor controlled and with onboard GPS, gyroscopes and accelerometers is able to move accurately to and hold itself at selected co-ordinates. I decided that I would like to have a go at building one myself, so I am going to log each stage here as my hexacopter is developed. I know it’s going to take a while, but hopefully I will get it finished.



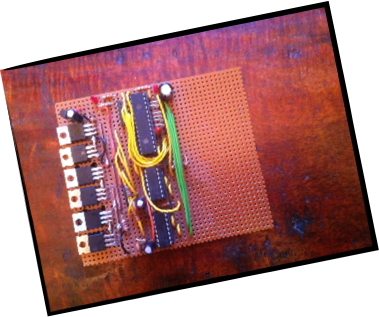



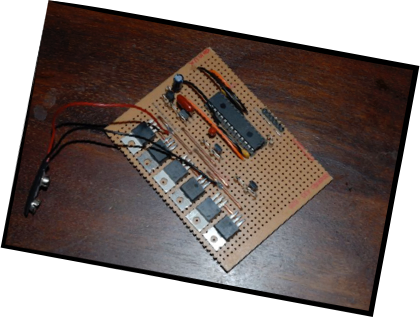
I have also designed and built a microprocessor board for controlling the speed of the motor. I am currently in the process of programming the processor, so it hopefully won’t be long before I have my first rotor turning.
One of the Brushless DC motors that I have purchased mounted onto a piece of steel box section.
Version 2 of the my BLDC motor controller. I have decided that 6 of these boards will probably add up to unnecessary weight for the hexacopter. I will save this for another project.

I decided to buy some ready made BLDC motor controllers. These are small and lightweight. These particular ones only run the motor in a single direction which is fine for this application. I have connected on to my motor and fed a pulse width modulated signal into it to test it’s operation.
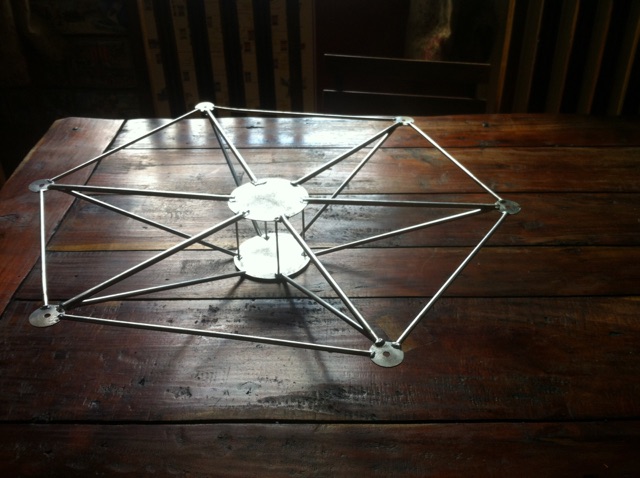
I have started to build the frame for the hexacopter. I have used thin walled aluminium tube and some sheet aluminium. I have joined the a aluminium using “Techno Weld” which is a zinc based ‘soldering’ rod. I need to add an undercarriage with extra supports for the arms.

One of the motors sat in place.



Some of the sensors that I have purchased to connect to the Hexacopter.
BMP085 Digital Pressure Sensor made by BOSCH
This device has an IIC interface.
MPU-6050 3 axis gyroscope and 3 axis accelerometer.
This device has an IIC interface.
NEO-6M GPS receiver by Ublox
This device has a 9600 baud serial interface.

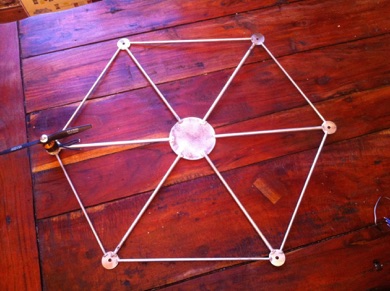
The completed frame, painted and fitted with motors.


The video below shows the motors being controlled by the PIC. The PIC is also receiving the signals from a RC receiver and individually controlling the 6 motors. I am still developing the stability control software using the MPU-6050 sensor above.